太空采矿,这个常常出现在科幻小说和电影中的场景,如今正在逐步走向现实。
太空采矿,这个常常出现在科幻小说和电影中的场景,如今正在逐步走向现实。
前不久,我国首台太空采矿机器人在中国矿业大学诞生,这台机器人不仅能适应太空的微重力环境,还配有“仿生六足移动结构”,可以在小行星坑洼不平的地面上行走。未来的“星际矿工”什么样?我们一起来看看。
想在太空“打工”,“造型”很重要
这款由中国矿业大学刘新华教授团队研发的多功能太空采矿机器人,与时下火爆的人形机器人和机器狗不同,它的基本形态为六足模式,有三个轮足和三个爪足。“之所以这样设计,主要是为了适应太空中的微重力环境。”刘新华解释道。
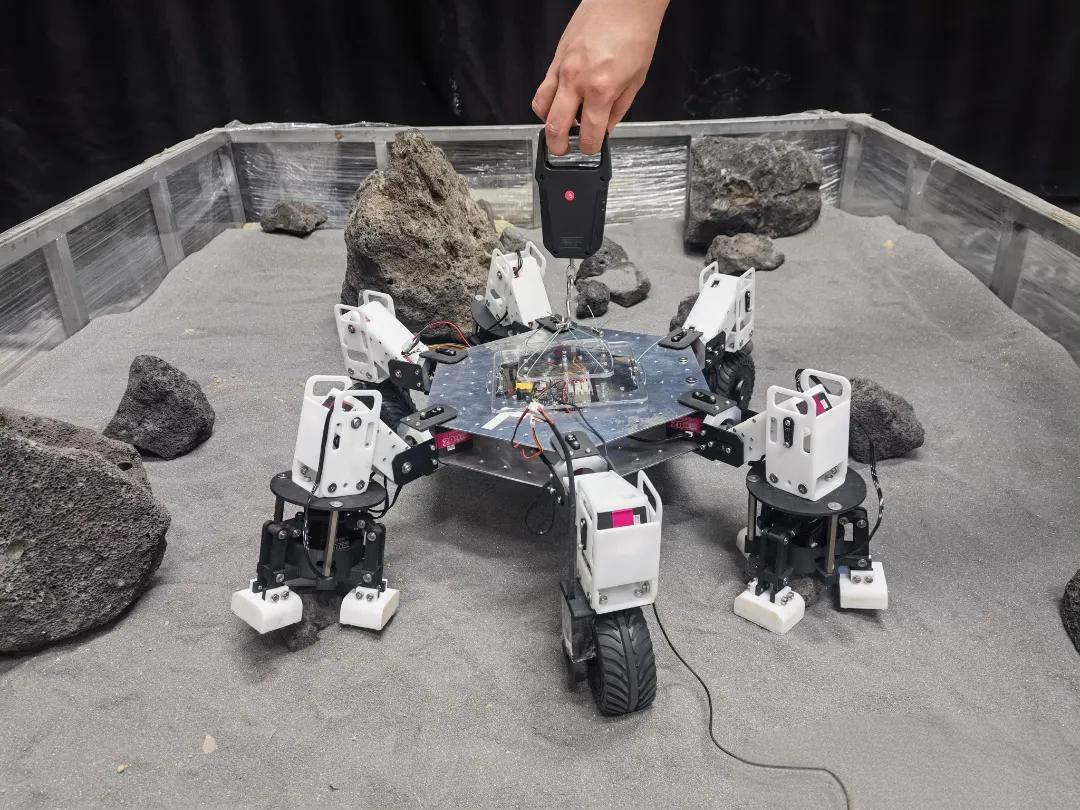
▲多功能集成化太空采矿机器人。(图片来自现代快报)
太空采矿机器人要在地外星体上完成地质勘探和矿物采集任务,钻探属于必备技能。在地球重力环境下,机器人本身的重量就足以支撑钻头钻进,而月球重力只有地球的六分之一,小行星上大多是低微重力,如何让钻头顺利钻进星体表面就成了大问题。为了解决失重带来的漂移,科研团队想到了模拟昆虫的爪刺结构,于是,为太空采矿机器人设计了特殊的爪刺足。刘新华表示:“微重力环境下,它的附着能力更强,抓地能力更强。”
更为巧妙的是,机器人还配备了一套差动系统。通过悬架、离合器、差动器和张角调节器的协同工作,机器人可以根据工作环境调整移动模块的结构形状。无论是崎岖不平的月球表面,还是布满陨石坑的小行星地表,这款机器人都能保持平稳运行,展现出极高的环境适应性。
作为“星际矿工”,得练就“十八般武艺”
太空采矿机器人要在太空星体上完成探矿采矿工作,不仅要面对微重力的问题,还要面对极端温差、真空、太空辐射以及重量体积限制等一系列难题。由于微重力环境无法搭建,研发出来的机器人究竟性能如何,该怎样检验呢?刘新华的团队给太空采矿机器人搭建了一个特殊的“训练场”。
“我们之前打听过宇航员专用的宇航实验室,做一次实验不仅花费高,而且并不完全适用于我们的机器人去实验,但如果不做实验的话,我们如何验证机器人在小行星的适应性呢?”中国矿业大学机电工程学院副教授华德正说,刘新华教授秉持着对科研的严谨性,带领团队成员利用目前从各渠道采集到的信息,提出用悬吊的方法开展实验,尽可能还原模拟行星的微重力环境。
 ▲内蒙古乌兰察布市,游客身着“航天服”在乌兰哈达火山群拍摄“月球漫步”和“火星探险”等创意纪念照。(图片来自中新社)
▲内蒙古乌兰察布市,游客身着“航天服”在乌兰哈达火山群拍摄“月球漫步”和“火星探险”等创意纪念照。(图片来自中新社)
经过团队成员两三个月的构思设计,一套悬吊系统搭建完成,简单地说,就是利用悬吊的方式抵消掉机器人的部分重力,并且能够在跟随机器人运动的同时,保持其垂直拉伸力的恒定,从而实现微重力环境的模拟效果。
团队成员介绍,经过在沙盘上不断训练,目前,通过六足差动系统悬架、离合器等协同工作,太空采矿机器人已经可以根据工作环境调整自身结构形状,适应地外星体的复杂地表环境。
据介绍,该机器人利用电能工作,未来构想可以实现原位开采,即边采边利用边转化,转化出的能源可作为供给再驱动机器人或其他设备工作。“这只是一个构想,目前还在研发阶段。未来在太空采矿实践方面,还有太多难点需要攻克,比如面对众多不确定性或外界干扰,机器人能否快速反应实时调整状态,能否保持原来的稳定性,这都是我们未来要研究探索的方向。”
地球资源有限,目标太空星体
随着地球资源开采强度的不断加大,获取成本将会越来越高。浩渺宇宙中,却隐藏着无限机遇,仅太阳系中,月球、火星、小行星等天体上都蕴藏着大量的矿产资源和稀有金属。在有限的地球资源最终将面临枯竭困境的威胁下,人类走向太空是必然选择。
专家介绍,20世纪50年代末以来,全球成功登月并开展探测任务的月球探测器和载人飞船已有80多个,积累了丰富的月球探测相关资料。目前中国、美国、俄罗斯等国都制定了载人登月计划,月球资源极有可能成为人类最先开发利用的太空资源。
此外,太阳系中数量众多的小行星也蕴藏着丰富的矿产资源,其中近地小行星运行轨道距离地球较近,同样开发利用相对便利,目前已初步掌握有1500多颗近地小行星具有非常高的开采价值和可采性。
相信不远的将来,我们就会在太空直播中看见“星际矿工”的身影。
参考央视新闻客户端、中国矿业大学微信公众号等内容资料
